
 产品:127
产品:127
 联系我们
联系我们

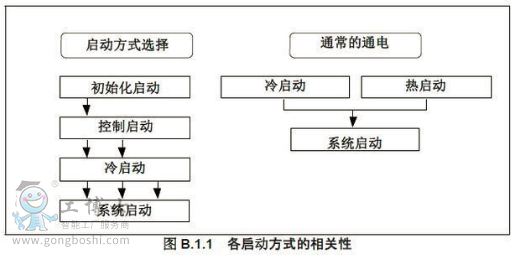
FANUC机器人控制装置有4种启动方法(开机方式)。
1. 初始化启动:执行初始化启动时,会删除所有程序,所有设定返回标准值。初始化启动完成后,自动执行控制启动。
2. 控制启动:执行控制启动时,控制启动菜单这一简易系统启动。虽然不能通过控制启动来进行机器人的操作,但是可以进行通常无法更改的系统变量的更改,系统文件的读出,机器人的设定等操作。可以从控制启动菜单的辅助菜单执行冷启动。
3. 冷启动:冷启动是在停电处理无效时执行通常的通电操作时使用的一种启动方式。程序的执行状态成为"结束"状态,输出信号全部断开。冷启动完成时,可以进行机器人的操作。
即使在停电处理有效的时候,也可以通过通电时的操作来执行冷启动。
4. 热启动:热启动是在停电处理有效时执行通常的通电操作时所使用的一种启动方式。程序的执行状态以及输出型号,保持电源切断时的状态而启动。热启动完成时,可以进行机器人的操作。
日常作业中,使用冷启动或热启动。使用哪一种,时随停电处理的有效/无效而定。
初始化启动和控制启动,在维修时使用。日常运行中不使用这些启动方式。
- 下一篇:人机协作成为工业机器人研发重点
- 上一篇:FANUC机器人中断程序恢复运行方法