
 产品:127
产品:127
 联系我们
联系我们

发那科机器人的操作系统是WinTPE,启动方式采用磁盘MS-DOS命令。在日常使用或者系统维护下,需要以哪种快捷方式来选择启动模式,这与电脑的操作系统是一样的。
二、已知的系统启动方式

1. 初始化启动 Init Start
启动方式:下文的Boot Monitor

SRAM内存、FROM内存恢复至初始状态,保留***初系统配置,所有用户程序、变量、文件被删除。如果进行此启动,需要做好备份,镜像备份和以上所有备份。
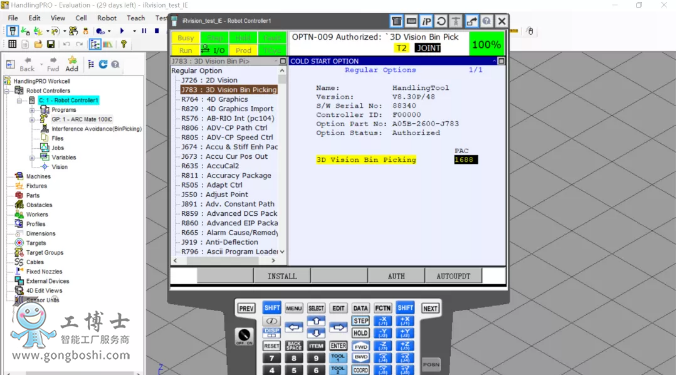
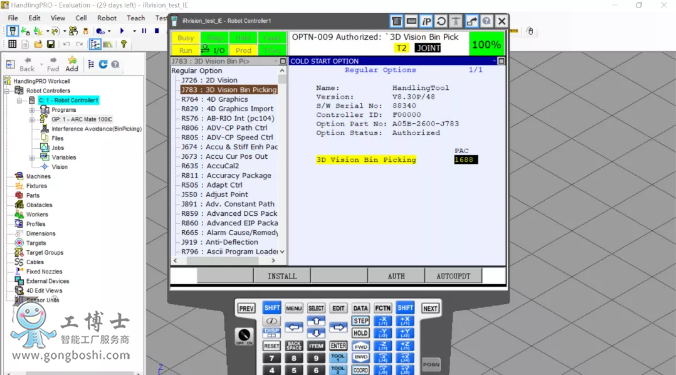
在冷启动下进行软件的授权安装,也是会进行Init Start ,但不同的是,会将备份文件存入带有系统文件的设备里面,在进行软件安装结束后,自行恢复至初始化前的系统配置,该过程是 自动的,无需人员干预。
2. 控制启动 Controller Start
启动方式1: 正常启动下,FCTN - 0 -restart -restart mode -controller start
启动方式2: 下文的Boot Monitor
启动方式3: 下文的Configuration Menu

该模式下,不能对机器人任何的点动和执行程序,但能够对一些通常不能改变的系统变量进行修改,也可以采用MS-DOS(.CM)命令批量修改系统。例如在该模式下可以进行软件(Option)的授权安装,寄存器、用户报警、工具坐标、用户坐标数量的修改,对示教器固件的升级,机器人、附加动作组的配置修改等等。
更多发那科机器人资讯请点击:http://fanuc-shanghai.gongboshi.com/